Private Beta v1.0 • Ready for Launch
+200
Early Beta Validation phase
Design. Audit. Deploy.
Design mobile robots in your browser. Validate logic, check electrical constraints, and export production-ready specs before writing a single line of ROS2 code.
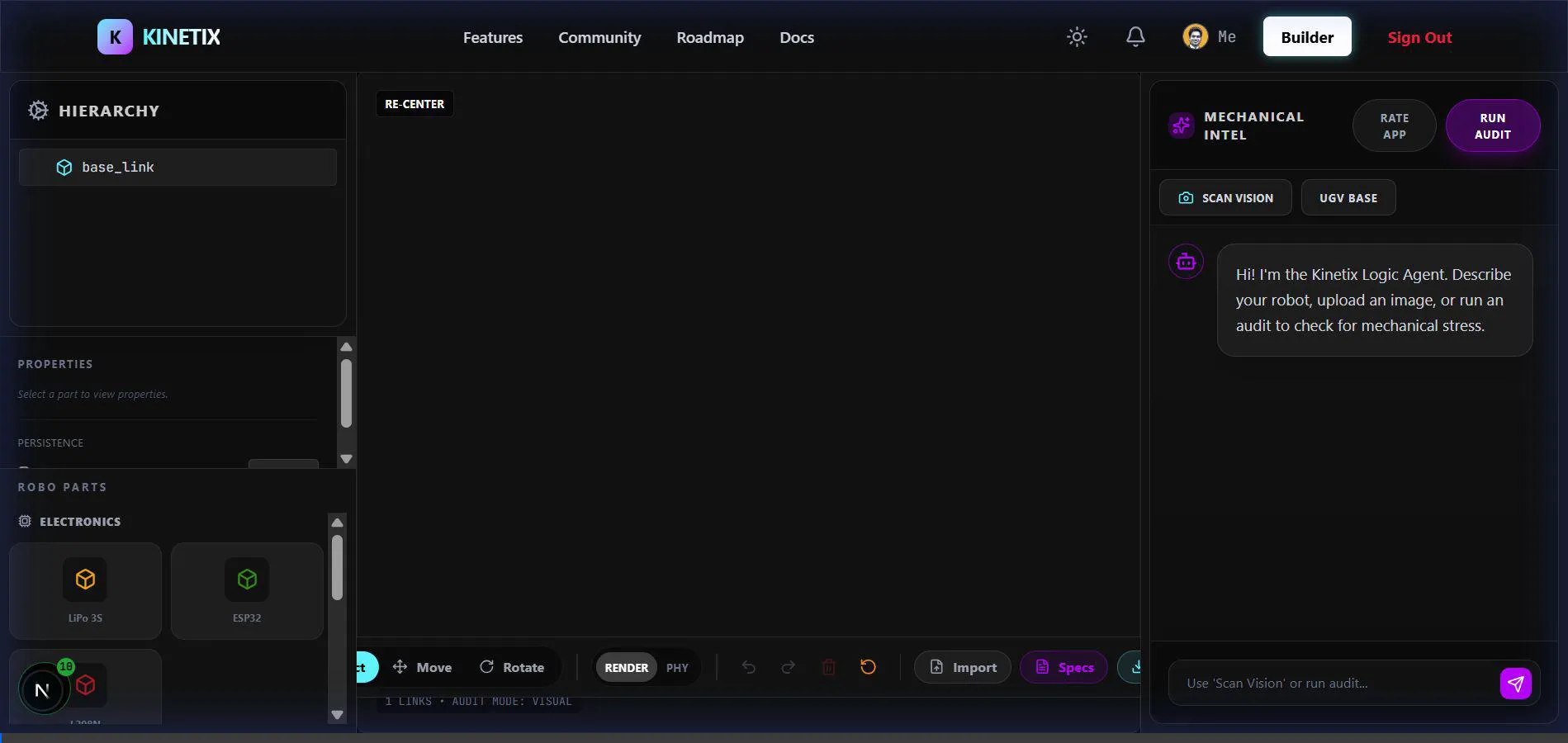
Live Builder Engine
Validated v1.0 Release